














 646 692
646 692

new system can access the anterior and posterior surfaces of
the kidney equally well, permitting excellent visualization
and maneuverability for retroperitoneal R-LESS PN at any
location. The SP1098 achieves these feats through a single
multichannel robotic port, which includes an assistant
channel, potentially decreasing wound morbidity and
improving cosmesis.
5.
Conclusions
RN and PN using the da Vinci SP1098 surgical system are
technically feasible. By overcoming the technical con-
straints associated with LESS, this approach may potentially
expand the role of single-site surgery in clinical practice.
The SP1098 system is still investigational, but these
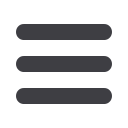
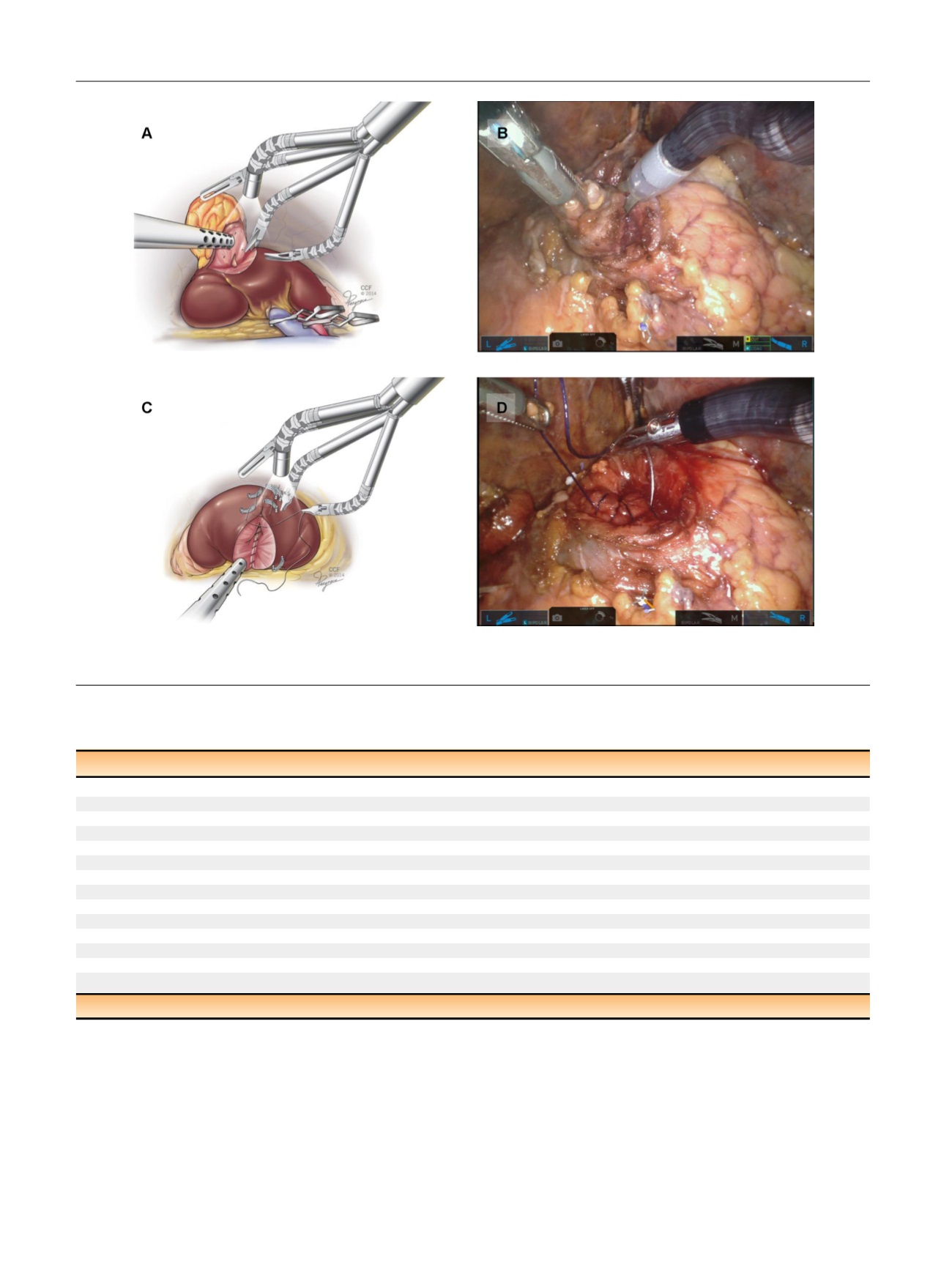
[(Fig._3)TD$FIG]
Fig. 3 – Illustrations and corresponding intraoperative photographs showing (A,B) parenchymal excision and (C,D) the inner renorrhaphy using a
2-0 polyglactin suture on an SH needle during robotic laparoendoscopic single-site partial nephrectomy.
Table 1 – Procedure data
Procedure
RN (
n
= 1)
Partial nephrectomy (
n
= 4)
Mean
SD
Laterality/site
Right
Left
Right
Left
Right
PN site
–
Anterior
Anterior
Posterior
Anterior
Excision size (cm)
–
2.5
2.5
3.8
3.3
Step times (min)
Incision
11
9
3
7
2
6.4
3.8
Port placement
9
6
2
6
2
5.0
3.0
Docking
7
5
2
4
2
4.0
2.1
Initial dissection to hilum
15
12
9
4
7
9.4
4.3
Hilar dissection/ligation
10
5
4
7
4
6.0
2.5
Renal dissection/defatting
–
33
19
23
37
28.0
8.4
Warm ischemia time
–
20
21
20
24
21.3
1.9
Renal mobilization
31
–
–
–
–
Specimen extraction
17
25
10
18
15
17.0
5.4
Total
100
115
70
89
93
93.4
16.4
RN = radical nephrectomy; SD = standard deviation.
E U R O P E A N U R O L O G Y 7 1 ( 2 0 1 7 ) 6 4 3 – 6 4 7
646