














 645 692
645 692

were performed using the standard two-layer technique. For RN, similar
steps were taken, except that the renal artery and vein were ligated using
Hem-o-Lok clips (Weck, Teleflex Medical, Research Triangle, NC, USA)
and divided with robotic scissors. The kidney was freed from its
remaining attachments and extracted through the primary incision after
extending it by 1 cm.
3.
Results
Three fresh male cadavers were used to perform RN (one
cadaver) and bilateral PN (two cadavers) for a total of one
RN and four PNs. For PN, the mean excision size was
3.0 0.6 cm. All cases were completed successfully using
the da Vinci SP1098 surgical systemwithout conversion or the
need for additional ports. There were no intraoperative
complications. The operative time was 100 min for RN,
and the mean operative time was 91.8 18.5 min for PN.
Step-specific times are listed in
Table 1.
4.
Discussion
We demonstrated the feasibility of the da Vinci SP1098
surgical system for single-site retroperitoneal renal surgery
in a preclinical model. The ability to adjust the instrument
arm without disturbing the position of the instruments
passing through expands the effective working space, even
within the tight confines of the retroperitoneal space,
and increases instrument maneuverability. Another new
feature is the presence of an instrument tracking system on
the surgeon’s display, which allows the surgeon to know
the location of the robotic instruments within the operative
field and signals the surgeon when the instruments are
nearing their respective limits of reach. These innovations
improve the functionality and efficiency of the single-site
robotic platform, permitting operative times on a par with
the standard robotic approach. By modifying the location of
the single-port site anterior and inferior to the 12th rib, the
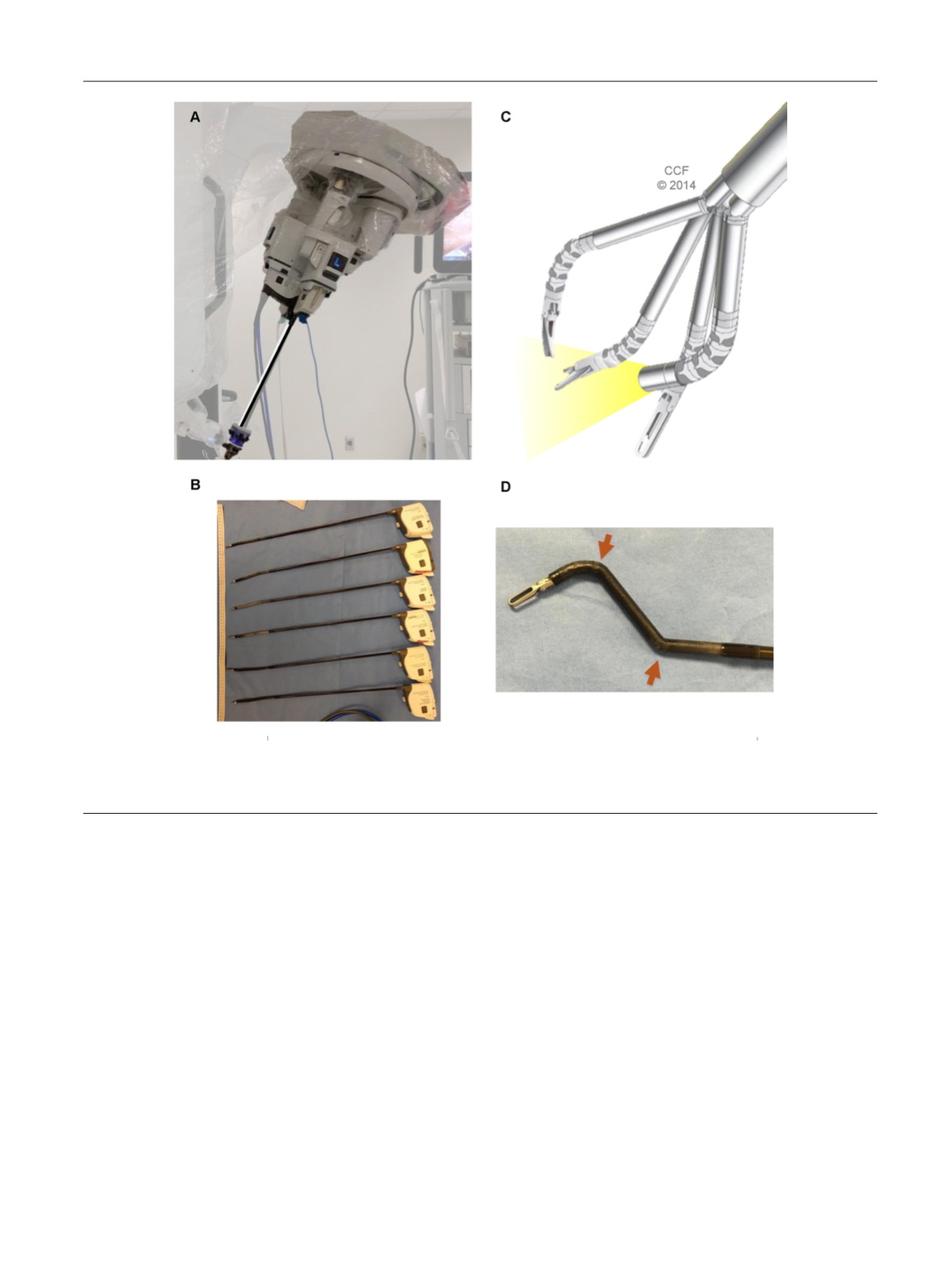
[(Fig._2)TD$FIG]
Fig. 2 – (A) The SP1098 instrument arm supports (B) four instrument drives that control the robotic instruments and articulating camera, all of which
enter the body through (C) a single robotic port. (D) Detail of an SP1098 EndoWrist forceps showing the double-jointed distal end with elbow and
articulating wrist joints that facilitate triangulation at the surgical site.
E U R O P E A N U R O L O G Y 7 1 ( 2 0 1 7 ) 6 4 3 – 6 4 7
645